ロボティクスの基礎やプログラミングの概念を“遊びながら”、“学ぶ”ことができるSTEM(※)学習教材として発表され、2019年10月11日から予約が開始されている“ZEONIC TECHNICS Robotics and Programming Course I”(以下“ZEONIC TECHNICS”)。『機動戦士ガンダム』のハロと会話を楽しめる『ガンシェルジュ ハロ』やビスケット型スピーカーと専用アプリ、豪華声優陣のボイスを組み合わせた『Bischa』など、多方面に意欲的なアイデアを盛り込んだ商品を展開しているバンダイ新規事業室が、いかにしてロボット工学とプログラムという、近年注目を集めるふたつの業界を“ザク”でつないだのか、“ZEONIC TECHNICS”のプロジェクト総責任者、原田真史氏に話を伺った。
※STEM……Science(科学)、Technology(技術)、Engineering(工学)、Mathematics(数字)の教育分野を総称する語。

原田真史氏
バンダイ新規事業室・デピュティゼネラルマネージャー
――本日はよろしくお願いします。今日は“ZEONIC TECHNICS”に関していろいろ聞かせてもらえたらと思っているのですが、プロジェクトが立ち上がった経緯、なぜロボティクスを学ぶ教材としてザクが選ばれたのかからお話してもらえますか?
原田教材のベースを何にするかというのは、ザクですんなり決まりました。一択でした(笑)。やはり、ザクは『ガンダム』シリーズに登場するモビルスーツの中でバリエーション機がいちばん多いですし、世の中には“俺ザク”みたいな言葉もあって、ファンの人たちがいろいろなザクを作り上げているぐらいですから。可能性を許容できるアーキタイプみたいなモビルスーツなので、今回の教材にはもっともクリエイティビティを呼び起こせるかなと判断しました。
バンダイはこれまでガンプラやフィギュアを筆頭に、ザクの立体物をいっぱい作ってきていますが、今回はそれら商品群とは差別化した新しい価値提供をしていきたいというコンセプトを念頭に置いて取り組んでいます。
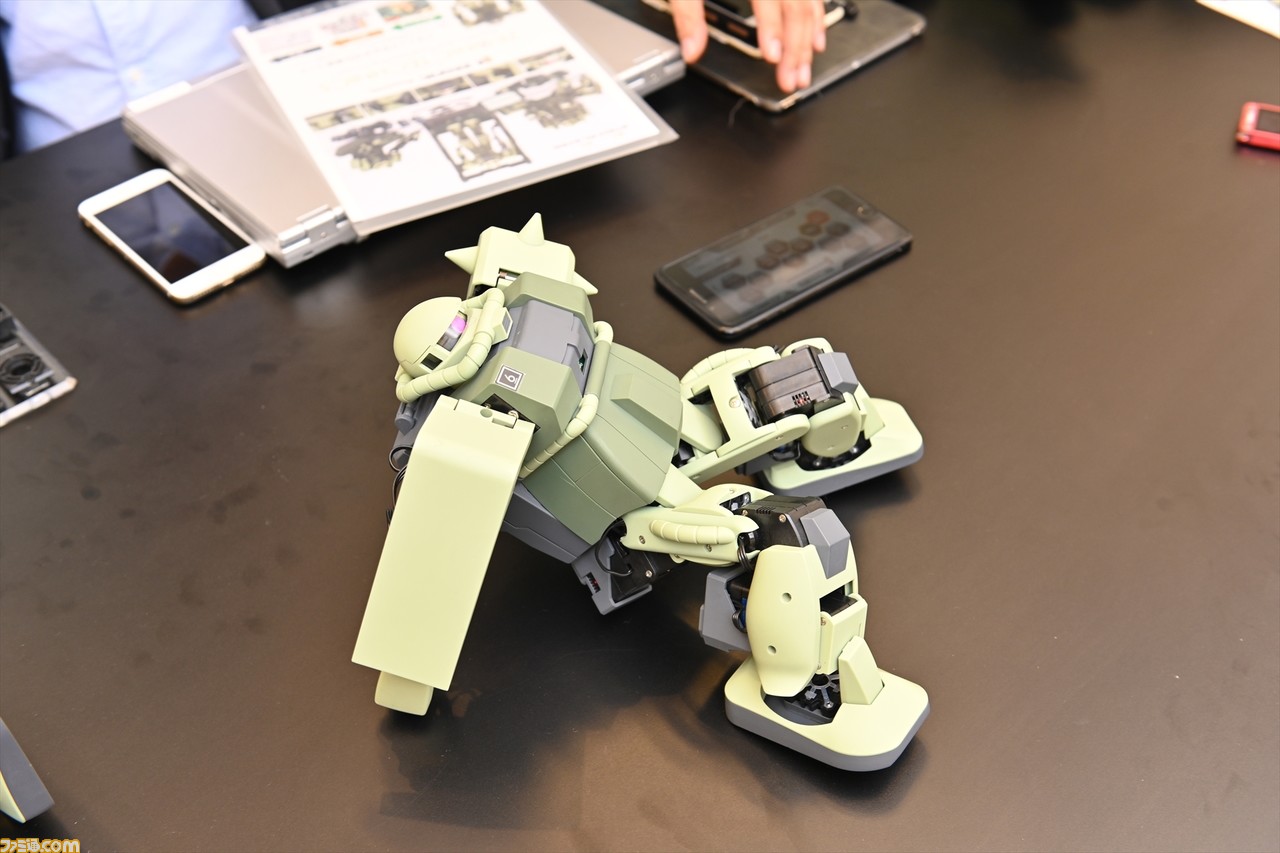
――なるほど。“ZEONIC TECHNICS”の紹介動画では、ザクが寝た状態から自力で立ち上がっている姿に衝撃を受けたのですが、あの動きは『機動戦士ガンダム』の1話、“ガンダム大地に立つ!!”っぽいじゃないですか。だからあれを再現するならザクではなくガンダムを採用するのもアリかなと思ったのですが、それよりはザクの持つ設定上の懐の広さが優先されたということでしょうか?
原田作ってみては試すのくり返しをするという一連をSTEM学習として捉えているので、懐の深さは重要です。商品紹介の動画では二足歩行でちゃんと歩くザクという紹介もしていますが、我々が“ZEONIC TECHNICS”で重要視しているのは原作シーンの再現ではないんですよ。あくまで自分でガンダムの世界の中でプログラミングしてロボットを動かして作り上げるというメカニック目線であり、そこで得られる楽しさや学びこそが重要だと捉えているんです。

――ガンダム以外のIPを利用することを考えたことはありましたか?
原田そこもあまり迷わずに、『ガンダム』でいこうとすぐに決まりました。『機動戦士ガンダム』を見て『ガンダム』を好きになった層が、いま40代で、お子さんがいたらもう中学生ぐらいだったりするわけです。“ZEONIC TECHNICS”は現状では、なかなかの値段がするものですし、親子で楽しんでもらえてロボティクスと親和性の高いIPとなると、やはり『ガンダム』に行き着きますよね。あとこれはちょっと本質からは外れるのですが、いま世の中でロボットを開発している人は、ほぼ例外なく『ガンダム』が好きというのもありました。
――なるほど(笑)。
原田そのため、目指すべきゴールを共有しやすいんです。たとえば、“これはザクの動きではない”という外見上の問題や動きが出てきたときに、意思疎通が簡単だというメリットもありました。そういった意味でも非常に稀有なIPですね。

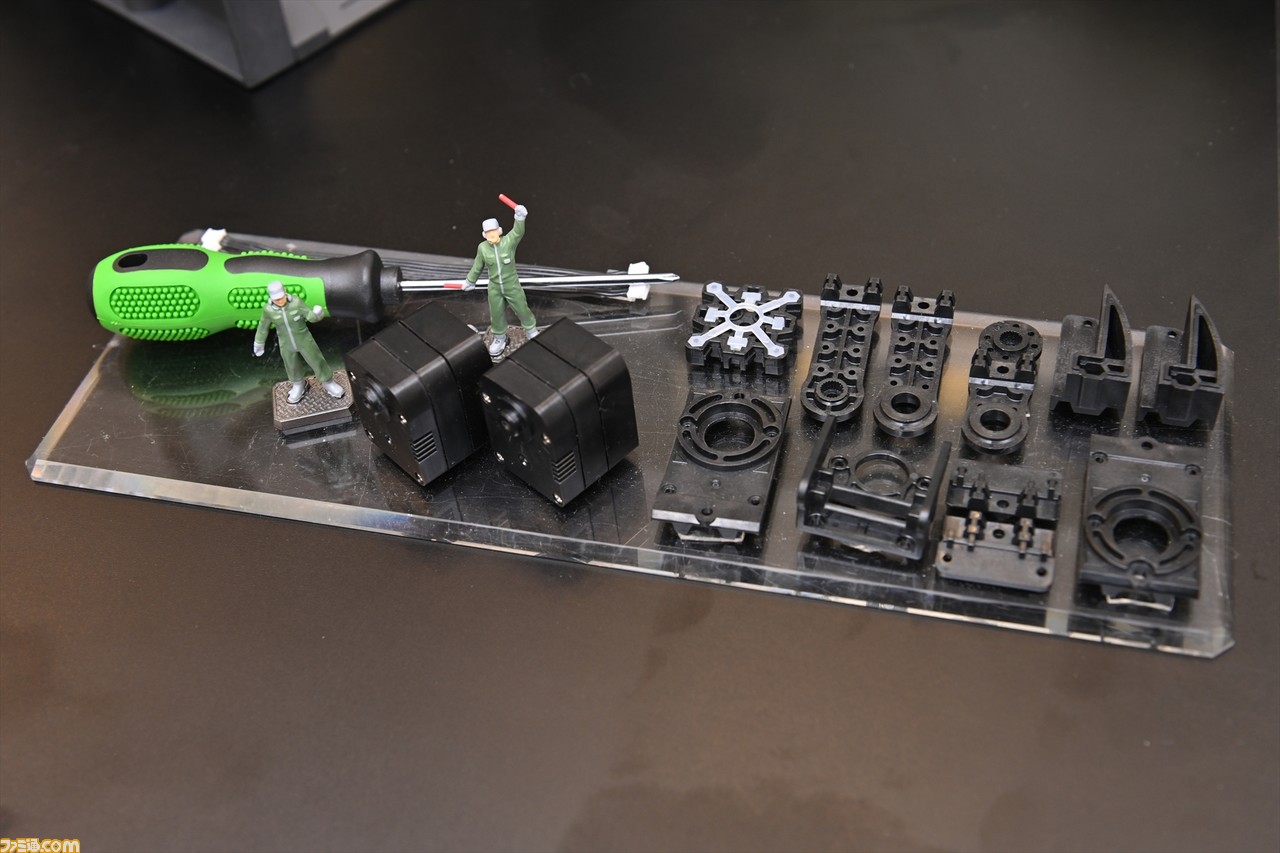
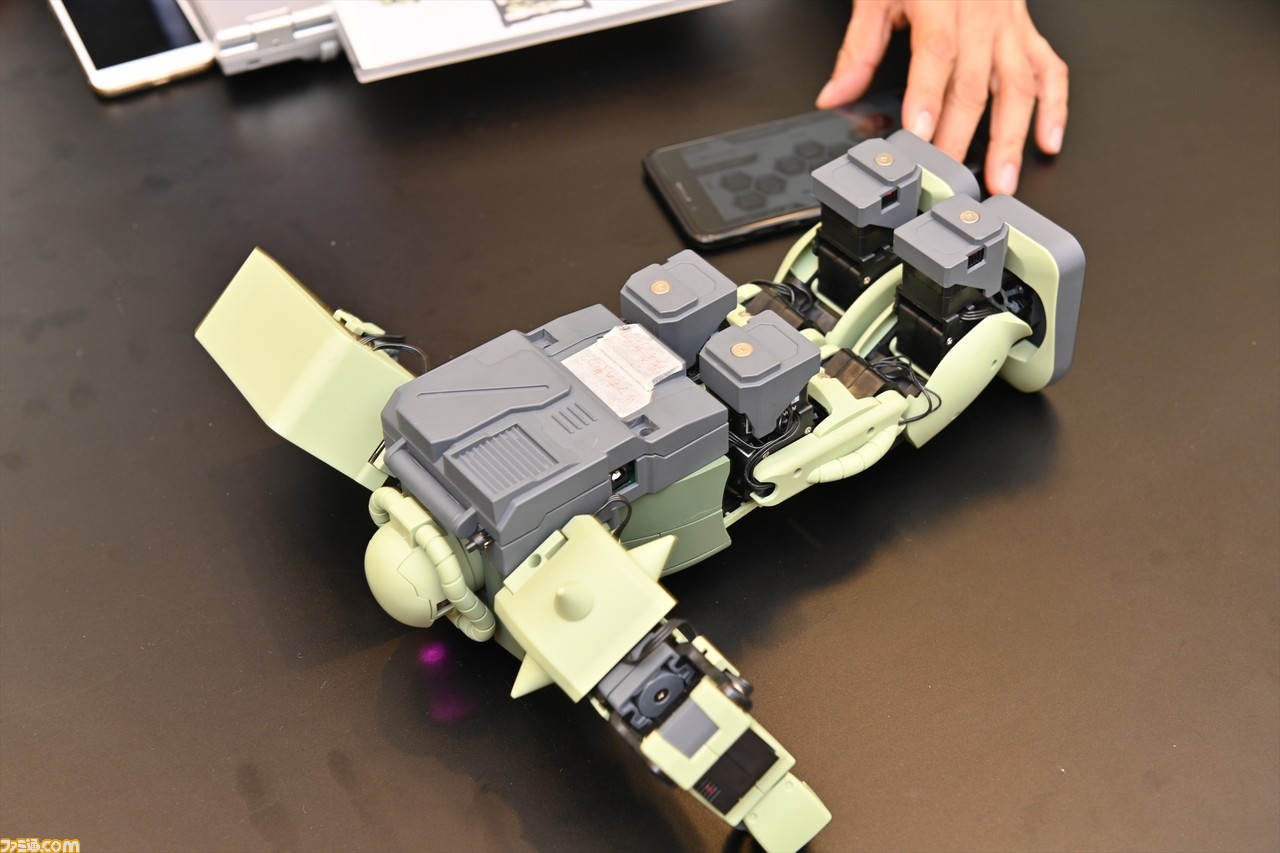
――動くロボットとしてのキモは両腕や両足に搭載されているサーボモーターなのかなと思うのですが、おもに両足と両腕に複数個搭載して、合計17個という数に落ち着いた理由は?
原田皆さんがイメージする2足歩行には、左右の脚それぞれに5つのサーボモーターが必要で、その時点で下半身に使うサーボモーターは10個に決まりました。
つぎに頭を動かすか、モノアイを動かすかで迷ったのですが、ここは『ガンダム』ファン視点で、モノアイの可動を優先させました(笑)。
腕に関しては2個ずつにするという選択肢もありましたが、自分でモーションをプログラミングして試行錯誤するという体験に価値を置いている商品として、腕にサーボモーターが2個だけだと、お客さんの期待値に届かないであろうという判断で、1本の腕に3つのサーボモーターを搭載するようにしました。やはり3つはないと、先ほどおっしゃっていた寝た状態から起き上がるような、インパクトのある動きが作れませんし。ロボティクスの観点から見ると、肘の部分にもサーボモーターを入れたかったのですが、腕にも4つ、5つと増やしていくと、ちょっとお高くなってしまう。そのため、上腕の部分(ヨー軸)に関しては、“自分の手で触って表情をつけてくださいね“という形でフリーな回転軸になりました。
ロボットの世界では可動=駆動ですから、こういうこと(自分で上腕のパーツや手首を動かして表情をつける)はあまりやらないですよね。だから、この腕の設計はバンダイならではありますね。


――そこは研究と商品のバランスってことですよね。コスト面の問題もあるでしょうけど、腕の部分のサーボモーターをこれ以上増やすと、ザクのルックスから外れる気もします。
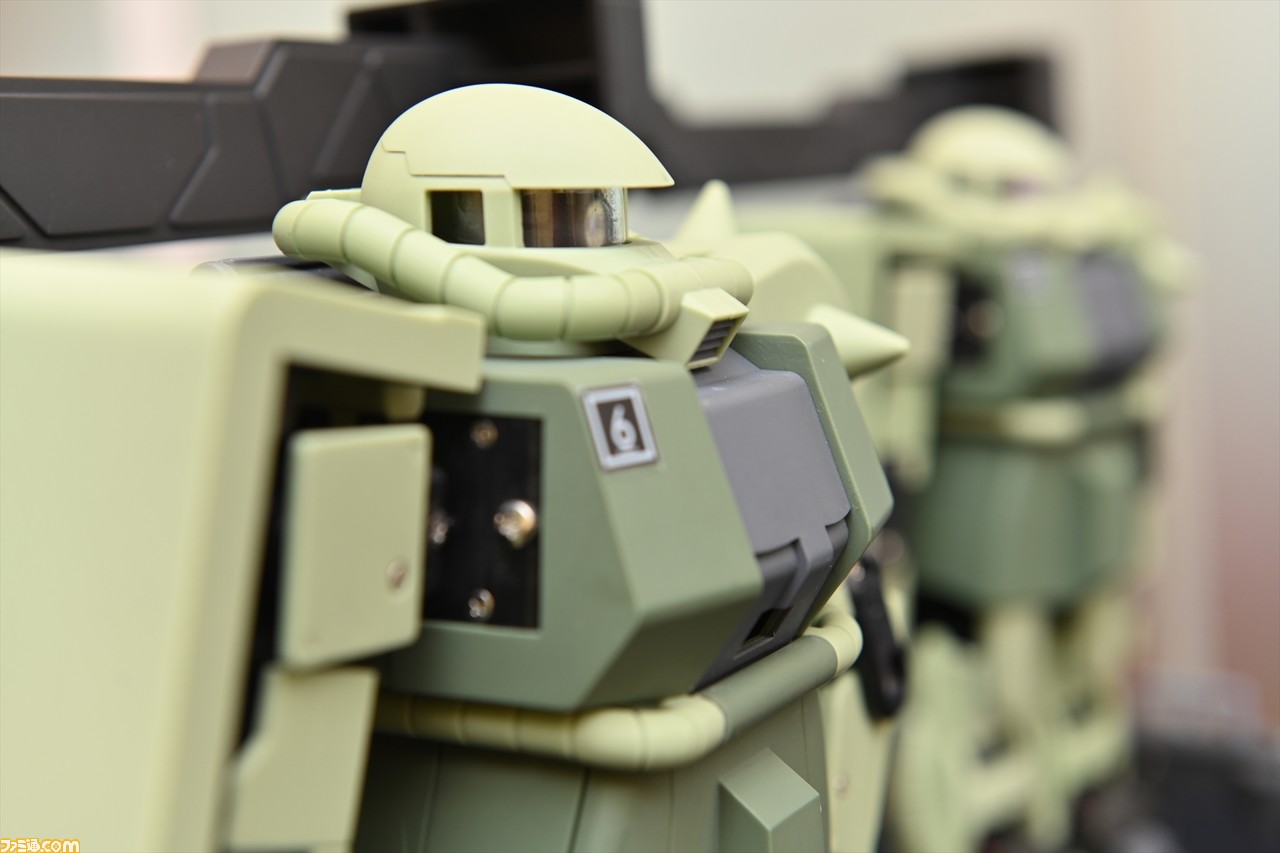
原田そうなんです。モーターを4つ使うなら、ザク自体のサイズをもうひと回り大きくせざるを得なくなるかと思います。このザクのサイズはサーボモーターから逆算して決まったものですが、いまの数だと約1/60スケールになっていて、収まりもいいんですよね。フィギュアと並べると雰囲気も出ますし。アクチュエーター(サーボモーター)と人間のサイズ感が比較しやすい。これを組み上げるのですから、モビルスーツ開発というのは、それはたいへんですよね(笑)。たかだか30 cmのザクを歩かせるのが難しいということは、17.5mのザクはどれだけたいへんなのか……というのにも思いをめぐらしてもらえると楽しいし、学びもあるかなと思います。
――今日は小気味よく動くザクを見させてもらいましたが、自分で歩かせるのはわりと難しい?
原田はい。組立にもかなりの調整が必要です。歩行系モーションは複雑なのでプリセットのモーションを使用するのですが、最初はよちよち歩きみたいなモーションでの確認になると思います。そこからきびきび動けるようになるまで試行錯誤して、最後に寝た状態から起き上がらせられるという流れを想定しています。だから起き上がる動きは、じつは『ZEONIC TECHNICS』で学べる最終段階に近いですね。
――そうなると移動に関しては、追加教材として発売が検討されている、ザクタンクのほうが簡単そうですね。
原田そうですね。まだ先の話になりますが、二足歩行のザクはロボティクスに寄っている教材で、ザクタンクはロボティクスというよりもプログラミングをより深く学べるようなイメージで考えています。タンクには(下半身の)裏に測距輪みたいなものがあって、自分がどこにいるか、オドメトリ(自己位置推定)みたいなものを使って学習するなどもおもしろいと考えています。
――二足歩行とタンクでは、サーボモーターの割り振りが違いますよね。タンクは腕の作りも見るからに違いますし。
原田腕の部分がグリッパーハンドになっているので、タンクの腕のほうが1個サーボモーターが多いです。その結果、この腕であれば物を掴んで運んだりすることができます。
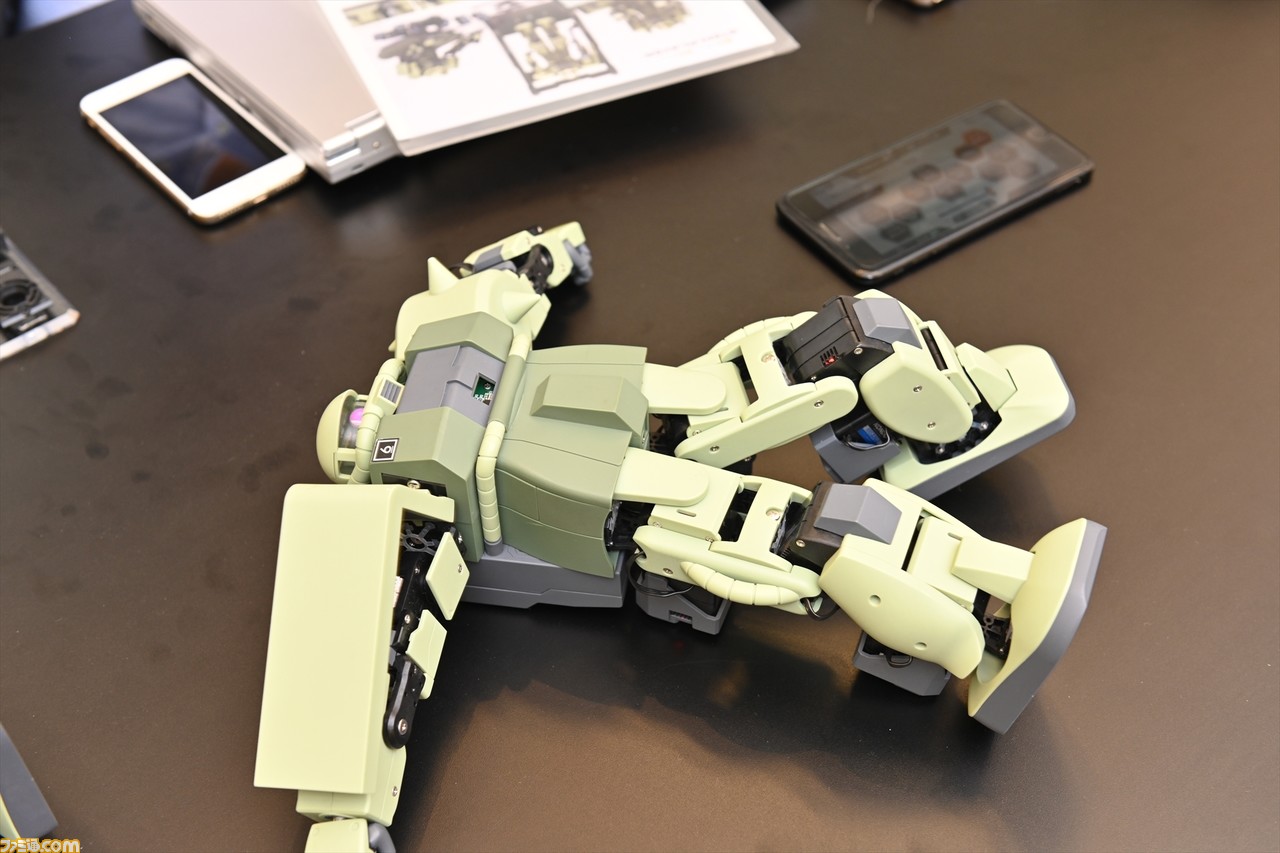
――試作ではなくて作例として多脚型のザクも紹介されていますが、あれで特別にできることはありますか?
原田じつはあれで特別なことができるかっていうと、現時点では何もできないです(笑)。ただ、だからこそ可能性は無限大というか、自分がイメージをした動き、働きをさせていくっていうのが“ZEONIC TECHNICS”のゴールなので。多脚型の場合は、この状態で前進、回転ができればすごいねということになるかと思います。
――動画で6脚歩行はできていましたよね? あの時点で相当がんばった結果が出ていると?
原田そうです。でもあれは相当なチートしているんですよ。足だけでサーボモーターを3×6、18個も使っていますし。製品として出す“ZEONIC TECHNICS”に追加する形で基板も一枚開発していますし、バッテリーも2個つんでいます。自作でロボットを作る人にとってもハードルの高い作例かと思います。「だったら、そんなのを見せるな」という意見もあるんですけど(笑)、可能性として出させてもらいました。

3つのプログラミング方法を採用で、ザクの動きが豊かに
――公式サイトではザクを動かすための制御方法が3つ、リモートコントロール、ブロックプログラミング、モビルトレースシステムがあると紹介されていますが、これらの特徴や使いわけるメリットについて教えてください。
原田リモートコントロールとブロックプログラミングの制御方法の目的自体はどれも同じで、専用アプリをインストールしたスマートフォンで作ったモーションを、実際のザクで実行、出力するために使うものです。まずやることは、サーボモーター個々を調節してポーズをつけることです。それが終わったらポーズを取る速度や、動いた際に鳴るSEを設定します。これでひとまずモーションは完成です。
こうやって作ったモーションを実際に使ってザクを動かすのも簡単で、たとえば作った“モーションA”をリモートコントロール画面に貼ると、タップするたびに“モーションA”を実行するようになります。
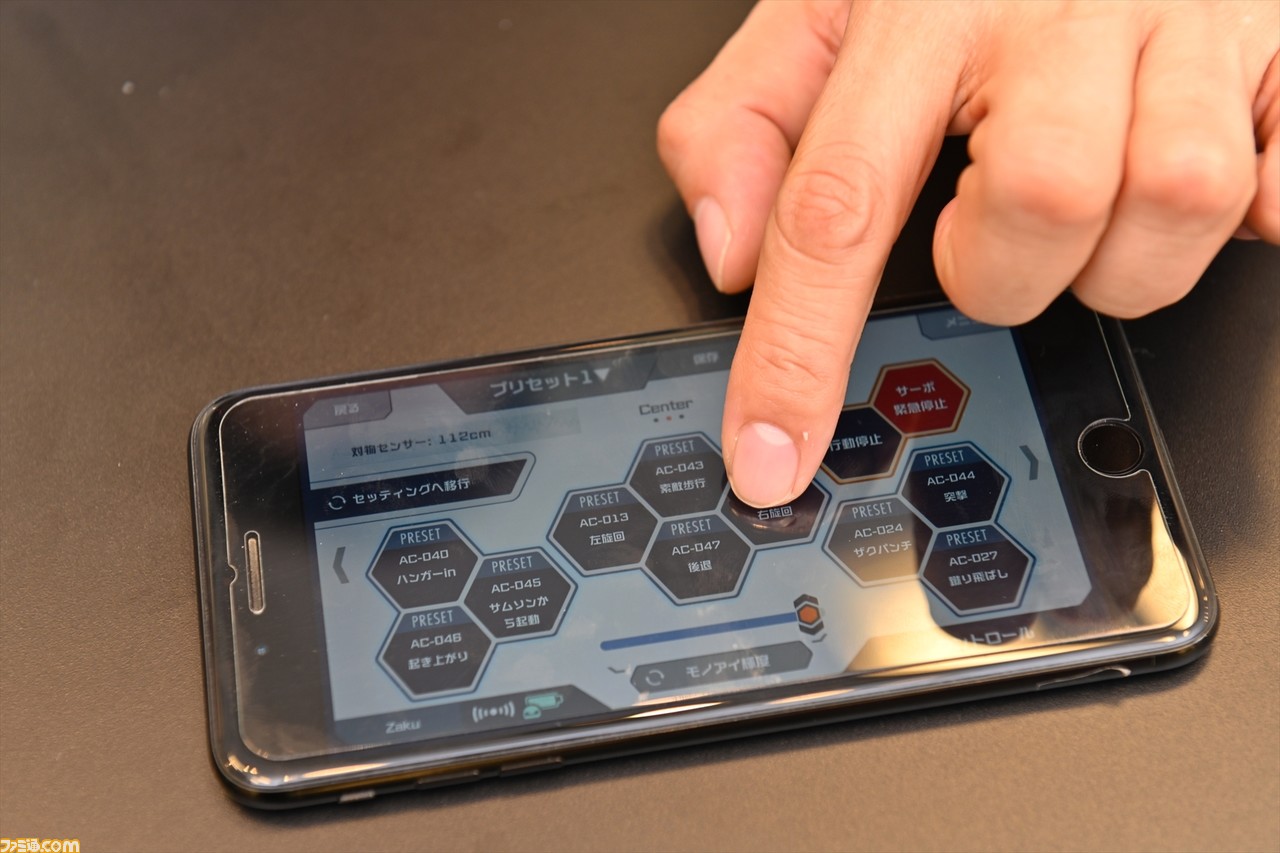
――なるほど。ブロックプログラミングの画面は、まさにプログラムっぽい画面というか、プログラムの授業でも出てくるような図に近いですよね。
原田そうです。ここでたとえば、目の前に敵(障害物)がいたらこう動けだとか、30秒ごとに特定の動きを行うなどの入力ができます。プログラムを成り立たせる3つの要素、くり返しと順序処理、条件文が学べるようになっています。
――モビルトレースシステムは基本的に腕だけに対応したモードですよね?
原田そうです。モビルトレースシステムは実験要素の強い制御方法で、けっこう危険なモードなんですよ。これを足に対応させるとザクが頻繁に転倒しまう (笑)。ですので、右手左手、あとモノアイを動かすものとして使っていくものです。原理としてはスマホを動かすことによって、ジャイロやヨー・ピッチ・ロール用の値を各サーボモーターにダイレクトに注入できる。その結果、自分の腕で動かしたスマホの動きを、リアルタイムでザクの腕にそのまま反映させられます。


原田この3種類の制御方法を使うと、シームレスに、目的に応じたロボット操作を簡単にできるんです。たとえば“特定のポイントに置いてあるものをつかむ”という目的があったとします。スタート時の移動はブロックプログラミングで作った動きを使って自動で歩かせて、対象物の前に来たら自動停止させ、リモートコントロールに設定した動きと自分の目で微調整して特定のポイントの正面に移動させる。そして最後にモビルトレースシステムで物を掴ませる……みたいな感じで、ロボットの使用用途に応じてユーザーが切り替えていく。こうやってシームレスにロボットを操縦できるというのは、既存の商品にはない、“ZEONIC TECHNICS”ならではの機能になっていると思います。
――この3つのプログラム方法は、単独で使うわけではないんですね。自分はてっきりモビルトレースシステムは初心者向け、 ブロック プログラミングコントロールは上級者向けみたいな位置づけだと思っていました。
原田そういうわけかたではないですね。3つ全部使ってもらって、ロボットができるいろいろな動きを、自分のやらせたい用途に合わせて使いわけていくということを学んでもらうのが大きな目的です。
――動画では寝た状態から立ち上がる動きがいちばんインパクトがありましたが、ほかにこれは見てほしいと思う動きはありますか?
原田インパクト、驚きを与えられるという点からいくと、やはり起き上がりがいちばんの動きになるのかなと思います。先ほどもお話した通り、スムーズな歩行、起き上がりというのは、“ZEONIC TECHNICS”でこれらのモーションが再生できるようになる状態は、ロボット(ハード)開発としてのゴールです。それ以上高度な動きは近藤科学さんのPC用ソフトなりを使ってチャレンジしてください、というのが答えになってしまいますね(笑)。







原田ただ、“ZEONIC TECHNICS”の専用アプリだけでも多くの学びと楽しみが得られるように作ってありますし、ザクを全部組み切る前からでもステップバイステップでプログラムは行なえるようにしています。頭を完成させた時点でモノアイを動かすプログラムは組めますし、上半身を作ったら胸の部分にある距離センサーとモノアイを連動した動きが作れます。そしてザクを全部組み終わったら付属教本を見つつ、実習を交えながらロボティクスとプログラミングの基礎を学ぶことができます。
教本は「実際のザクには流体内パルスが使われているけれども、みなさんは初心者だからサーボモーターからステップアップしていきましょう」みたいなジオニック社が宇宙世紀にMS開発初心者向けに出していた教材という形を取っているので、『ガンダム』が好きな人はさらに楽しんでもらえるかと思います。
――『ガンダム』内での設定とも折り合いがつけられているんですね。
原田ファンの方の中には「なぜサーボモーターを使っているのか。宇宙世紀にサーボモーターなのか?」と言われたりもしているのですが、そこにはちゃんと設定的な理由付けもしています(笑)。サーボモーターはロボティックスを学ぶためにはいちばんいいエントリーモデルなので。宇宙世紀でも数学を学ぶときには九九は学ぶでしょうし、ロボティクスを学ぶときも基礎から学ぶ道筋があるでしょうと。
――なるほど(笑)。では今回のザクで商品展開が軌道に乗って別のモビルスーツ、たとえばツィマッド社のヅダやドムが採用になったら、教本の設定も変わってきたりするのですね。
原田そこはぜひ行きたい領域ですね。とりあえず教本は今回のジオニック社みたいな上から目線ではなくなっているかもしれないです。ツィマッド社だったらつねにズダの土星エンジンのすばらしさを書いてあったりしそうですね(笑)。
――今回の学びという観点からはちょっとズレますが、10年20年という時間が経ったらサーボモーターは小型化していくと思うんですけど、そうなったらたとえばガンプラにサーボモーターが積まれたり、逆にもっと出力を上げて、もっと大きなもの、お台場のユニコーンガンダムを動かしたり……みたいなことも可能になるのですか?
原田可能性はあると思います。ただなかなかロボットは物理法則という複雑な世界の中で生きざるを得ないので、実際のモビルスーツと同じサイズのものを原作のように動かしたり、『ガンダムVS』シリーズみたいなアクロバティックかつスピーディーな動きをさせるのは、さすがに無理だと思います(笑)。
――本日はありがとうございました。最後にメッセージなどあればお願いします。
原田現在、3月発売に向け“ZEONIC TECHNICS”の受講予約を受け付け中です。ぜひ、この機会に第一期生に申し込まれることをお待ちしています(現状では12月中には栄えある“第一期生”の募集は終了となる見込みです)。